ロボットの障害物検知用に超音波センサーを3~6つ動かしたくなったので、作成してみた。
環境
Windows 11
PlatformIO
M5ATOM Lite
M5Stack用Port A I2C拡張ハブユニット(PaHUB2 Unit)
M5Stack用超音波測距ユニット I2C 3つ
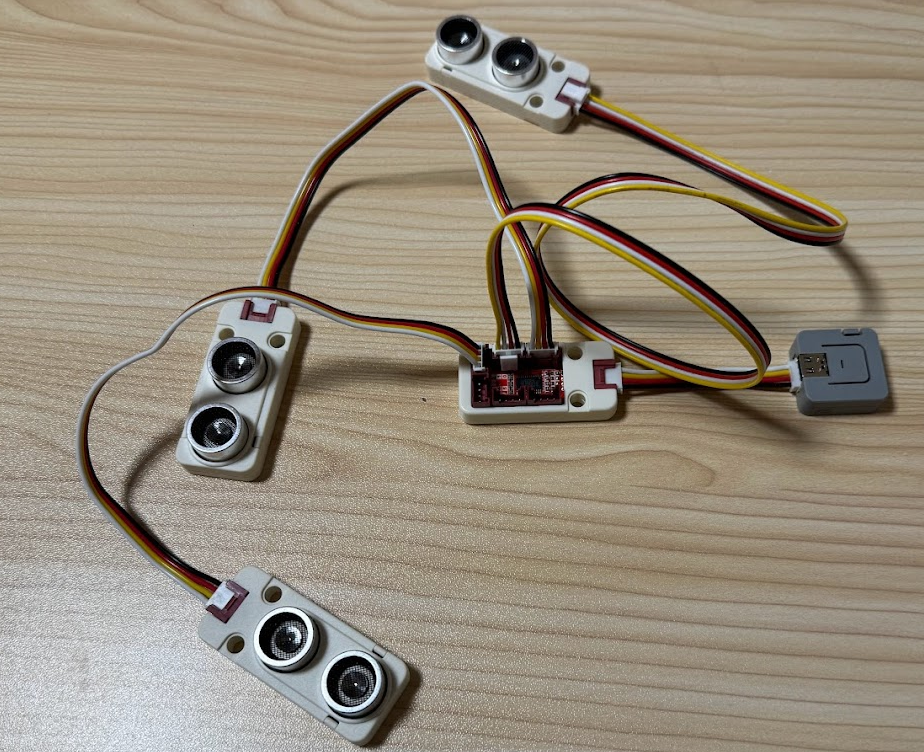
ハードウェアの選定と組み立て
お手軽に作りたいので、M5ATOM Lite(以下ATOM)とM5Stack用超音波測距ユニットI2Cをチョイス。
この測距ユニットはATOMとI2C通信でやり取りする。
そこまではいいけど、距離ユニットのI2Cアドレスが固定されているため、そのままではATOMに2つ以上を直接接続できない。
なので、M5Stack用Port A I2C拡張ハブユニット、略してPaHUB2も併せて使用。
PaHUB2は複数のI2Cデバイスを切り替えて動かせるので、同じアドレスを持つ複数のユニットをM5Stack(ATOM含む)に接続できる。
あとはケーブルでつなぐだけで、ハードウェア完成。簡単、簡単。
プログラム
ソフトウェアはUIFlowを使うのがお手軽でいいんだけど、いずれROS2化することも考慮して、C言語で作成。
platformio.ini
[env:m5stack-atom]
platform = espressif32
board = m5stack-atom
framework = arduino
lib_deps =
m5stack/M5Unit-Sonic@^0.0.2
closedcube/ClosedCube TCA9548A@^2020.5.21
closedcube/ClosedCube I2C Driver@^2020.9.8
m5stack/M5Unified@^0.1.12
main.cpp
#include <M5Unified.h>
#include <Unit_Sonic.h>
#include "ClosedCube_TCA9548A.h"
#define PaHub_I2C_ADDRESS 0x70
#define SONIC_NUM 3
ClosedCube::Wired::TCA9548A tca9548a;
SONIC_I2C sensor;
void setup()
{
M5.begin();
tca9548a.address(PaHub_I2C_ADDRESS);
sensor.begin();
}
int updateFPS()
{
static int psec = 0;
static int fps = 0;
static int frame_count = 0;
int sec = millis() / 1000;
frame_count++;
if (psec != sec)
{
psec = sec;
fps = frame_count;
frame_count = 0;
}
return fps;
}
void loop()
{
std::string output = "";
char buffer[30];
int fps = updateFPS();
for (uint8_t channel = 0; channel < SONIC_NUM; channel++) {
tca9548a.selectChannel(channel);
float distance = sensor.getDistance();
sprintf(buffer, "%d:%3.1fcm ", channel, distance / 10);
output += buffer;
}
sprintf(buffer, "fps:%d\r\n", fps);
output += buffer;
Serial.printf(output.c_str());
delay(10);
}
このプログラムの注意点とか
超音波センサーでの測定には時間がかかる。実際、getDistance()関数の中でも120ms待ってから測定結果を取得している。
3つのセンサーを順番に測定するとそれだけで360msの待ち時間が必要になる。
プログラムを見直せば並列で測定もできるかもしれないけど、現状でも3つのセンサーで毎秒2回程度測定できているので、まあいいかな。
リンク
PaHUB2のドキュメント
M5ATOM Liteのドキュメント
M5ATOMと超音波センサーを使ったサンプル
RCWL-9620のチップ情報(zip)